
 |
| El Posmo A sobre mi mesa preparado para hacer pruebas. |
Para mis pruebas voy a conectar el cable Profibus, la alimentación de potencia y un detector inductivo que hará las veces de leva de referenciado.

Para configurarlo necesitamos el Simocom A, que podemos descargar de la página web de Siemens (no es necesaria licencia). Es un software muy sencillo, está en español incluida la completa ayuda, y nos servirá para hacer la configuración y también comprobar el correcto funcionamiento del servomotor. Para conectarnos tendremos que hacerlo necesariamente a través de Profibus, ya sea directamente o por enrutado (routing) a través de un PLC. Si no tenemos el servomotor también podemos hacer la configuración off-line y transferirla posteriormente.
Mi intención es configurar el Posmo para realizar posicionamientos absolutos en modo MDI (Manual Data Input), así que ejecuto el Simocom A y me conecto.

En el Simocom A tenemos a la izquierda un árbol con las distintas opciones de configuración. En la primera pantalla definiremos el modo de funcionamiento. El que yo necesito es Posicionar y como mi Posmo irá acoplado a un husillo lo configuro como Eje lineal.

A continuación voy al apartado Mecánica, donde especifico el paso del husillo, o sea, lo que avanza el eje lineal con cada vuelta del servomotor. En la casilla Juego de inversión se introduce la holgura que presenta nuestra mecánica al cambiar el sentido de giro.

En el apartado Límites especificaremos la velocidad y aceleración máxima que estarán permitidas a nuestro servomotor. Son parámetros importantes, ya que otros parámetros se referirán en relación porcentual a estos valores.

El servomotor dispone de la posibilidad de conectar dos entradas / salidas digitales libremente configurables. En mi caso voy a conectar en el borne 1 la señal de referenciado, dejando el borne 2 sin función.

En el apartado Vigilancia podemos activar límites de recorrido, para mantener nuestro servomotor dentro de un margen de funcionamiento. Además podemos establecer una vigilancia de posicionamiento, de forma que salte una alarma en el caso de funcionamiento anómalo.

En el apartado Regulador se puede modificar algún parámetro de regulación, pero con la configuración de fábrica nunca he tenido problemas.
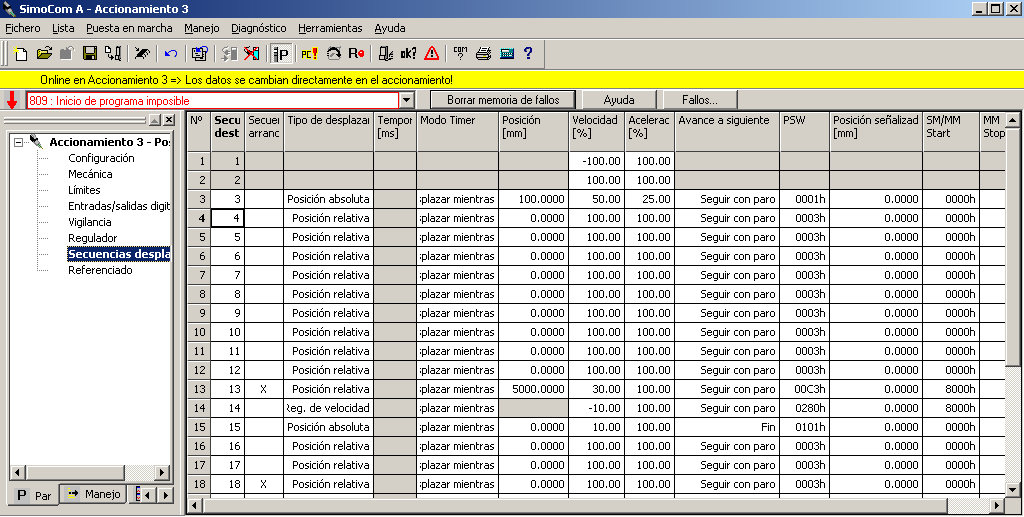
En el apartado Secuencias de desplazamiento podemos programar movimientos de forma que llamando al número de secuencia se realice el movimiento configurado. Los bloques 1 y 2 están reservados para Jogging. En modo MDI , cuando se transfieren los valores de posición, velocidad y aceleración, se guardan en el bloque número 3. Otros bloques pueden, a su vez, estar reservados para realizar la secuencia de referenciado.

Finalmente, en el apartado Referenciado configuraremos la secuencia de referenciado. La secuencia que necesito es:
- avanzar hacia la derecha hasta encontrar la leva de referenciado.
- detener el movimiento.
- avanzar hacia la izquierda a velocidad lenta hasta perder la leva.
- detener el movimiento.
- ajustar esa posición como origen (cero).
Se podría mejorar la precisión buscando el impulso de origen del encóder, pero para mi aplicación no es necesario.
Voy a configurar el número de secuencia 13 para iniciar el referenciado, sentido positivo de búsqueda inicial de le leva de referenciado, con inversión de sentido al encontrar la leva y especifico que la leva de referenciado está conectada al borne 1.

Una vez terminada toda la configuración deberemos guardarla en la EPROM del servomotor, para no perderla ante una caída de tensión. También es recomendable guardar los parámetros en un archivo .par.
El Simocom A nos permite probar el funcionamiento del servomotor. Para ello deberemos tomar el control desde el PC (botón PC! de la barra superior). Con F8 desbloquearemos el regulador y ya podremos realizar movimientos en modo Jog, probar el referenciado, posicionados, etc.

Tal y como viene de fábrica, la configuración del referenciado tiene un comportamiento que, en mi caso, no es deseable: se mantiene la señal en referencia incluso después de una pérdida de tensión. Lo que necesito es que sea necesario referenciar cada vez que se encienda la máquina, ya que si se mueve el eje con la máquina apagada, las posiciones del servomotor serán incorrectas, al llevar un encóder relativo.
Para solucionar este inconveniente deberemos entrar en la Lista de experto, para que nos muestre todos los parámetros del regulador.

Buscamos el parámetro 56 Opciones de funcionamiento.

Lo seleccionamos y pulsamos F4 para editarlo.

Y según lo especificado en el manual de configuración, debemos marcar los bits 0 y 1. Con esto, cada vez que demos tensión al servomotor deberemos hacer un referenciado. No olvidemos guardar en EPROM los cambios.
Hasta aquí este ejemplo de configuración de servomotor Posmo A. En una siguiente entrada me meteré con la programación desde un PLC S7-300.
Cualquier comentario será bienvenido.


Buenas tardes;
ResponderEliminaryo también he utilizado este servo y tengo alguna pregunta a ver si me la puedes solucionar.
Dentro del Simocon, el valor de velocidad que aparece en el apartado "limites", como se calcula?
Se puede cambiar desde plc la velocidad del posmo?
Saludos